OSM Namespace Reference
Functions | |
| template<class T1 > | |
| T1 | matching_id (std::vector< T1 > &a, string b) |
| string | Read_tag (string input) |
| CONVERTER::Pos * | compute2DPolygonCentroid (const std::vector< CONVERTER::Pos *> vertices, int vertexCount) |
| bool | Cellspace_check (std::vector< CONVERTER::IC *>input) |
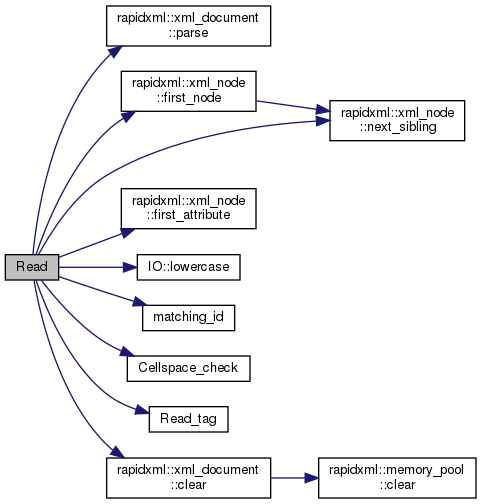
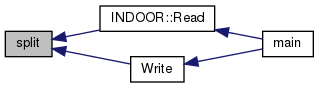
| std::vector< CONVERTER::IC * > | Read (std::string PATH) |
| template<class T1 > | |
| T1 | matching_id (std::vector< T1 > &a, int b) |
| char * | Read_tag (char *input) |
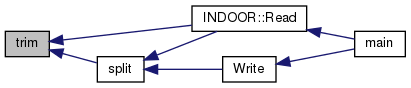
| std::vector< std::string > | split (std::string &strToSplit, char delimeter) |
| std::string | trim (const std::string &str) |
| using because of IndoorGML Description More... | |
| std::string | Write_tag (std::string &input) |
| void | Write (std::vector< CONVERTER::IC *>IC_vector, std::string PATH) |
Function Documentation
◆ Cellspace_check()
| bool Cellspace_check | ( | std::vector< CONVERTER::IC *> | input | ) |

◆ compute2DPolygonCentroid()
| CONVERTER::Pos * compute2DPolygonCentroid | ( | const std::vector< CONVERTER::Pos *> | vertices, |
| int | vertexCount | ||
| ) |
Definition at line 30 of file OSM_Reader.cpp.
Definition: Transform.h:126
Pos class in IndoorGML, Node in OSM latitude in OSM and IndoorGML longitude in OSM and IndoorGML h...
Definition: Transform.h:61
◆ matching_id() [1/2]
| T1 OSM::matching_id | ( | std::vector< T1 > & | a, |
| string | b | ||
| ) |

◆ matching_id() [2/2]
| T1 OSM::matching_id | ( | std::vector< T1 > & | a, |
| int | b | ||
| ) |
- Template Parameters
-
T1
- Parameters
-
a - vector<IC*> IC vector b - OSM id(Node, Way, Relation)
- Returns
- - IC*
◆ Read()
| std::vector< CONVERTER::IC * > Read | ( | std::string | path | ) |
- Parameters
-
path - input OSM data
- Returns
- - IC *
Definition at line 80 of file OSM_Reader.cpp.
96 for (xml_node<> * xml_node = root_node->first_node("node"); xml_node; xml_node = xml_node->next_sibling("node")) {
109 for (xml_node<> * xml_relation = root_node->first_node("relation"); xml_relation; xml_relation = xml_relation->next_sibling("relation")) {
115 for(xml_node<> * xml_member = xml_relation->first_node("member"); xml_member; xml_member = xml_member->next_sibling("member")){
125 else if (strcmp(IO::lowercase(xml_tag->first_attribute("v")->value()), "cellspaceboundary") == 0) {
126 for(xml_node<> * xml_member = xml_relation->first_node("member"); xml_member; xml_member = xml_member->next_sibling("member")){
136 for(xml_node<> * xml_member = xml_relation->first_node("member"); xml_member; xml_member = xml_member->next_sibling("member")){
147 for(xml_node<> * xml_member = xml_relation->first_node("member"); xml_member; xml_member = xml_member->next_sibling("member")){
157 for (xml_node<> * xml_way = root_node->first_node("way"); xml_way; xml_way = xml_way->next_sibling("way")) {
171 for(xml_node<>*xml_tag=xml_way->first_node("tag");xml_tag;xml_tag=xml_tag->next_sibling("tag")){
180 for (xml_node<> * xml_way = root_node->first_node("way"); xml_way; xml_way = xml_way->next_sibling("way")) {
189 for(xml_node<>*xml_tag=xml_way->first_node("tag");xml_tag;xml_tag=xml_tag->next_sibling("tag")){
210 // state_input->pos = compute2DPolygonCentroid(CellSpace_Pointer->pos_vector,CellSpace_Pointer->pos_vector.size());
220 CONVERTER::CellSpaceBoundary * CellSpaceBoundary_Pointer=matching_id(CellSpaceBoundary_vector,osm_str);
225 for(xml_node<>*xml_tag=xml_way->first_node("tag");xml_tag;xml_tag=xml_tag->next_sibling("tag")){
238 for(xml_node<>*xml_tag=xml_way->first_node("tag");xml_tag;xml_tag=xml_tag->next_sibling("tag")){
260 for (xml_node<> * xml_relation = root_node->first_node("relation"); xml_relation; xml_relation = xml_relation->next_sibling("relation")) {
299 for (xml_node<> * xml_relation = root_node->first_node("relation"); xml_relation; xml_relation = xml_relation->next_sibling("relation")) {
302 for(xml_node<>*xml_tag=xml_relation->first_node("tag");xml_tag;xml_tag=xml_tag->next_sibling("tag")){
308 for(xml_node<> *xml_member=xml_relation->first_node("member");xml_member;xml_member=xml_member->next_sibling("member")){
312 matching_id(IC_vector,xml_member->first_attribute("ref")->value())->Description.append("storey=");
313 ((CONVERTER::CellSpace*)matching_id(IC_vector,xml_member->first_attribute("ref")->value()))->storey=level;
314 matching_id(IC_vector,xml_member->first_attribute("ref")->value())->Description.append(to_string(level)+";");
318 for(xml_node<> *xml_member=xml_relation->first_node("member");xml_member;xml_member=xml_member->next_sibling("member")){
320 IC_POINTER->inner.push_back(matching_id(IC_vector,xml_member->first_attribute("ref")->value()));
xml_node< Ch > * next_sibling(const Ch *name=0, std::size_t name_size=0, bool case_sensitive=true) const
Definition: rapidxml.hpp:1004
Definition: Transform.h:78
xml_node< Ch > * first_node(const Ch *name=0, std::size_t name_size=0, bool case_sensitive=true) const
Definition: rapidxml.hpp:936
Transition class in IndoorGML, Transition(way) in OSM weight in IndoorGML Member of pos in Transiti...
Definition: Transform.h:117
CellSpaceBoundary class in IndoorGML, CellSpaceBoundary(way) in OSM Member of pos in CellSpaceBounda...
Definition: Transform.h:91
bool Cellspace_check(std::vector< CONVERTER::IC *>input)
Definition: OSM_Reader.cpp:72
Definition: rapidxml.hpp:139
Definition: rapidxml.hpp:137
Pos class in IndoorGML, Node in OSM latitude in OSM and IndoorGML longitude in OSM and IndoorGML h...
Definition: Transform.h:61
xml_attribute< Ch > * first_attribute(const Ch *name=0, std::size_t name_size=0, bool case_sensitive=true) const
Definition: rapidxml.hpp:1025
Definition: IMDF_UNIT.h:9
Here is the call graph for this function:
Here is the caller graph for this function:

◆ Read_tag() [1/2]
| string OSM::Read_tag | ( | string | input | ) |

◆ Read_tag() [2/2]
| char* OSM::Read_tag | ( | char * | input | ) |
◆ split()
| std::vector< std::string > split | ( | std::string & | strToSplit, |
| char | delimeter | ||
| ) |
Definition at line 11 of file OSM_Writer.cpp.
std::string trim(const std::string &str)
using because of IndoorGML Description
Definition: OSM_Writer.cpp:28
Here is the call graph for this function:

Here is the caller graph for this function:
◆ trim()
| std::string trim | ( | const std::string & | str | ) |
using because of IndoorGML Description
- Parameters
-
str sting
- Returns
- string
Definition at line 28 of file OSM_Writer.cpp.
Here is the caller graph for this function:
◆ Write()
| void Write | ( | std::vector< CONVERTER::IC * > | IC_vector, |
| std::string | PATH | ||
| ) |
- Parameters
-
IC_vector - memory IC vector PATH - Output OSM data Path
Definition at line 45 of file OSM_Writer.cpp.
65 node->append_attribute(doc1.allocate_attribute("lat", doc1.allocate_string((((CONVERTER::Pos*)it)->latitude).c_str())));
66 node->append_attribute(doc1.allocate_attribute("lon", doc1.allocate_string((((CONVERTER::Pos*)it)->longitude).c_str())));
79 nd->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string(((CONVERTER::CellSpace*)it)->pos_vector[i]->osm_id.c_str())));
85 tag->append_attribute(doc1.allocate_attribute("v", doc1.allocate_string((((CONVERTER::CellSpace *) it)->name).c_str())));
94 tag->append_attribute(doc1.allocate_attribute("k", doc1.allocate_string(Write_tag(token[0]).c_str())));
110 nd->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((((CONVERTER::CellSpaceBoundary*)it)->pos_vector[i]->osm_id).c_str())));
116 tag->append_attribute(doc1.allocate_attribute("v", doc1.allocate_string((((CONVERTER::CellSpaceBoundary*) it)->name).c_str())));
124 tag->append_attribute(doc1.allocate_attribute("k", doc1.allocate_string(Write_tag(token[0]).c_str())));
135 way->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string((it->osm_id).c_str())));
140 nd->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((((CONVERTER::Transition*)it)->pos_vector[i]->osm_id).c_str())));
148 tag->append_attribute(doc1.allocate_attribute("k", doc1.allocate_string(Write_tag(token[0]).c_str())));
157 rapidxml::xml_node<> *relation_cellspace = doc1.allocate_node(rapidxml::node_element, "relation");
158 relation_cellspace->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
166 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
175 rapidxml::xml_node<> *relation_cellspaceboundary = doc1.allocate_node(rapidxml::node_element, "relation");
176 relation_cellspaceboundary->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
183 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
193 relation_state->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
200 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
209 rapidxml::xml_node<> *relation_transition = doc1.allocate_node(rapidxml::node_element, "relation");
210 relation_transition->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
217 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
230 relation->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
235 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
240 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->duality->osm_id).c_str())));
254 relation->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
259 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
263 member_1->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->duality->osm_id).c_str())));
279 relation->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
284 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
288 member_1->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it1->osm_id).c_str())));
305 relation->append_attribute(doc1.allocate_attribute("id", doc1.allocate_string(std::to_string(OSM_RELATION_ID--).c_str())));
310 member->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it->osm_id).c_str())));
314 member_1->append_attribute(doc1.allocate_attribute("ref", doc1.allocate_string((it1->osm_id).c_str())));
xml_node< Ch > * allocate_node(node_type type, const Ch *name=0, const Ch *value=0, std::size_t name_size=0, std::size_t value_size=0)
Definition: rapidxml.hpp:415
void append_attribute(xml_attribute< Ch > *attribute)
Definition: rapidxml.hpp:1217
Ch * allocate_string(const Ch *source=0, std::size_t size=0)
Definition: rapidxml.hpp:476
std::vector< std::string > split(std::string &strToSplit, char delimeter)
Definition: OSM_Writer.cpp:11
Definition: Transform.h:78
An element node. Name contains element name. Value contains text of first data node.
Definition: rapidxml.hpp:146
A declaration node. Name and value are empty. Declaration parameters (version, encoding and standalon...
Definition: rapidxml.hpp:150
Transition class in IndoorGML, Transition(way) in OSM weight in IndoorGML Member of pos in Transiti...
Definition: Transform.h:117
CellSpaceBoundary class in IndoorGML, CellSpaceBoundary(way) in OSM Member of pos in CellSpaceBounda...
Definition: Transform.h:91
Definition: rapidxml.hpp:139
Definition: rapidxml.hpp:137
xml_attribute< Ch > * allocate_attribute(const Ch *name=0, const Ch *value=0, std::size_t name_size=0, std::size_t value_size=0)
Definition: rapidxml.hpp:447
Pos class in IndoorGML, Node in OSM latitude in OSM and IndoorGML longitude in OSM and IndoorGML h...
Definition: Transform.h:61
Here is the call graph for this function:
Here is the caller graph for this function:

◆ Write_tag()
| std::string Write_tag | ( | std::string & | input | ) |